背景介绍

众所周知,用于建立三维模型的航测数据必须符合一定的要求,最重要的一点是要保证用于建模的相片数据与pos数据呈一一对应的关系。因此,航测原始数据一般都需要内业人员进行处理。
接下来为大家介绍航测数据内业处理的一般流程,思维导图如下:

处理流程

1.检查照片数量是否有缺失

注意:在编辑POS信息时,要先备份差分POS信息,或者将后差分POS导入到excel表内再进行处理。
【五镜头数据】:检查5个镜头下的照片数量是否一致,且与POS数据的数量是否一致;
【单镜头数据】:检查照片数量与POS数据的数量是否一致。
【如遇到数量不一致的情况时,常见的处理方式如下:】
一般来说,飞手会记录缺失的照片编号,然后内业数据处理人员检查pos数量,并删除对应位置的pos信息,最后保证照片数量与pos数量一一对应即可。




举例:上述图中五镜头这份数据,其文件夹内删除了5张地面照片,但是24条异常pos对应的照片还没有删除,所以文件夹内有24+3574=3598张,而后差分POS数据没有删除5条地面数据及24条异常pos数据,所以总数为5+24+3574=3603。因此若是相片和pos文件都分别剔除了地面数据及异常数据,则相片数量与pos条数量是一致的,为3574。

2.删除异常信息及不需要的信息

后差分POS文件内一般只需要保留北坐标、东坐标(或者纬度、经度)及高程值这三列,其他数据可以删除,如果遇到坐标异常的数据(通常飞手会备注),则删除对应异常信息并同时删除异常数据对应的照片。



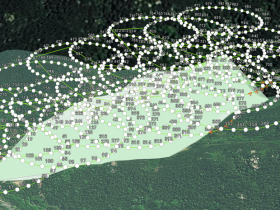
3.根据高程值,删除地面数据

通过POS数据的高程值,删除飞机起飞及降落时所采集的地面POS数据,并删除对应的照片。
注意:若为五镜头的数据,每个镜头对应的照片都需要删除地面照片。
一般来说,地面数据集中在POS数据的开头和结尾处。
先观察整体的POS数据得出正常的高程值范围,然后再设置一个属于地面高程值的范围来选出地面的POS数据,再进行删除操作。
最后根据所删除POS在后差分POS内的顺序,删除对应的地面照片,例如下图1到5号的数据高程值为135左右,明显低于其他pos点数据的高程值,因此判断1到5号数据为地面数据。


4.照片重命名

由于无人机内的相机在拍摄时,不同架次的不同镜头生成的相片的默认命名都是相同的编号方式,因此在原始相片中,仅能通过不同文件夹的命名来区分其所属的架次及镜头类型。
但是在建模时,建模软件容易因相同命名而无法正确匹配对应的pos数据,可能会使相片与pos建立错误的对应关系,因此我们需要保证相片命名的唯一性,并且通过相片名字与pos点的ID来建立一一对应的关系。
(1)区分日期
如果飞行区域较大,可能导致工期较长,每天可能都会有较多的架次,所以需要进行区别。
(2)区分架次
航测区域过大时,需要分区进行。一个区域飞完成,相当于一个架次完成。无人机完成了一个飞行流程,就生成了一份原始POS数据。
所以若数据分几个架次进行航测,则需要制定用于区分不同架次的命名规则,例如“1”对应“第一架次”,“2”对应“第二架次”等等,以此类推。只有一个架次可不作区分。
(3)区分镜头
若是五镜头的数据,则需制定用于区分不同镜头数据的命名规则,例如“1”对应“前”,“2”对应“后”等等,以此类推。单镜头可不作区分。
(4)区分照片顺序
照片的原始排列顺序与pos数据的原始排列顺序一般来说都是一一对应的,所以不可随意命名,需在其原始顺序下重新编号。
(5)根据上面制定的规则,使用小工具(如拖把更名器等)进行照片重命名
注意:照片重命名是对原文件直接操作,所以建议更名前先备份。
添加文件后,点击上方菜单栏的“序号”,在“模板”处制定固定的命名部分;编写完后需要加一个“#”,做为通配符。
然后,在下方的设置处,设置变化部分;当预览效果符合需求,点击“应用”即可。
在未退出软件前,可以点击“撤销”来回滚成未修改状态。


5.修改POS数据内点号

下面介绍常用的数据整理方式。
若为五镜头,则需制作5份POS数据,然后分别将每一份POS数据导入到excel内。根据照片的名称修改POS名字,使其一一对应,最后删除标题行。



6.制作多镜头对应的POS数据

5个镜头时,需要复制5份数据,并且使用“替换”来修改pos名字。



7.整合POS数据

由于三维建模软件对POS数据内的分隔符有一定的要求,分隔符处理不当可能会导致读取POS文件失败,而所有三维建模软件较支持的分隔符为一个空格,所有POS数据内的列与列之间最好分隔符只要一个空格。
而经过excel表格处理的数据,粘贴出来后会发现列与列之间存在多个空格,针对这种情况我们一般可以通过txt处理:
1)首先,我们可以新建一个文本文件,将所有处理好的POS数据粘贴到一个txt文件上。
2)然后,我们使用“替换”功能来将多个空格换成一个空格,替换完成后保存即得到了最终处理好的POS数据。



8.旋转照片(可选)

某些三维建模软件对照片的中心点像素有要求,需要进行统一,而照片的方向不一致,会影响照片的中心点像素,所以需要进行照片的旋转。



9.制作group(可选)

部分三维建模软件需要group文件,文件主要包含输入的照片及POS信息对应的镜头类型。
将整合好的pos数据导入到excel内,只保留POS名字这一列,然后在新的一列中,使用“mid”函数来提取对应的架次代号,最后将得到的数据粘贴到新建的文本文件中,然后将列与列之间的分隔符替换成一个空格,最后得到的就是处理好的group文件。



总结

上述就是航测数据内业处理的一般流程,核心思想就是保证相片数据与pos数据呈一一对应的关系!