前言
在近期photoscan很多朋友问如何利用五镜头数据导入photoscan,通过这一段时间摸索,现在把本人方法公布给大家做参考,如果有更好的方法,欢迎讨论。(本案例以倾斜相机为案例)
环境要求
-
Photoscan 1.4.3
-
五镜头倾斜相机照片(前视 后视 下视 左视 右视 )
-
五镜头相机照片对应的pos文件(可选)
操作步骤
-
整理文件目录
-
建立堆块chunk,并导入对应照片
-
导入照片pos 信息(可选)
-
添加像控点标识
-
合并堆块,设置批量操作
-
设置坐标系,导出空三文件
整理文件目录
从倾斜相机中分别拷贝出相机照片,并建立以相机位置命名的目录。

建立堆块chunk,并导入对应照片
-
打开photoscan 1.4.3,点击左下方【工作区】,在工作区导航栏下,左键选择创建【添加堆块】

2. 在对于相机位置处左键选择【Add】,然后选择添加【添加照片】【添加文件夹】

注意,如果是选择文件目录添加,请在弹出对话框,选择从每个文件创建相机

导入照片pos 信息(可选)
-
本案例,以HC12倾斜相机为例,通过基站数据和倾斜相机内置PPK,解算出相机曝光点位置,通过CGO解算软件将WGS84转换为当地坐标,并按照每个相机位置,分别创建POS位置文件。(部分倾斜相机没有PPK模块可以跳过)

2. 在photoscan工作区,双击选中要导入相机位置

3.在左下角选择【参考】,再在左上角选择【导入】,选择此相机位置对于的POS文件,本案例是前视镜头。

注意,POS文件格式如下:照片名.JPG,X ,Y, Z(经度,纬度,高程),中间推荐用空格隔开。扩展名为“.txt”

在软件解算过程中,强烈推荐把POS和控制点转换成同一个坐标系统,方便后续加点,本案例是CGO设置目标坐标系,把直接将WGS84转换成本地坐标系。

添加像控点标识
-
在参考导航栏下,再次点击导入,把准备好的控制点文件,导入进去后弹出【导入CSV】界面对话框,此时设置当前控制点坐标系,并检查向北,向东是否对应。外业常常会把向北和向东坐标对调,点击【ok】确认

注意,控制点TXT文件的导入格式如下:点名,X, Y ,Z。推荐用空格分开
2.选中其中一个控制点,右键然后选择【标记筛选照片】

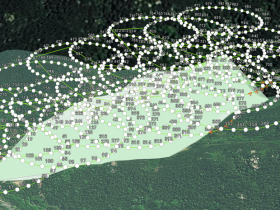
在右下角,显示出筛选后,选中该控制点的所有照片,一般该控制点就在地面像控点标记附近,其准确性,取决于PPK精度。一开始控制点标记旗子是暗灰色
按住左键拖动标记旗子后,放入实际地面像控点位置,会变成绿色,表示控制点位置确认


在同一个控制点中国,定位三张以上照片,此控制点标记位置会越来越高。按照这个方法,定位3个以上控制点,或者把控制点全部定位完成,以确保精度。
合并堆块,设置批量操作
点击左下角,【工作区】,点击【工作流程】,在下拉菜单中,选择【合并堆块】,如下图弹出的对话框,选择五镜头项目堆块,right,left,middle,rear和front全部打钩,点击【ok】

合并完成后,会出现 【Merged Chunk】

再选择【工作流程】,下拉菜单找到【批量处理】,如下图,选择【添加】,作业类型选择【对齐照片】,适用于选中【选择】,在下面对话框中,选择刚刚合并的堆块“Merged Chunk”,注意下面的精度选择【低】即可,确认后,空三就开始了


设置坐标系,导出空三文件
在左上角,选择【文件】然后找到导出,选择【导出相机】,在弹出的对话框中,选择导出格式是【block exchange】