2019.7.16
一、系统组成
一、前言
2018年6月12日,大疆创新正式发布Phantom 4 RTK无人机,引起了测绘业界的广泛关注与热议,中海达凭借着多年的行业应用和经验积累,紧跟市场需求,在Phantom 4 RTK无人机为用户提供PPK后处理接口后,及时发布配套的PPK套装。Phantom 4 RTK结合中海达的PPK套装后,可以协助用户更加高效可靠的进行1:500高精度减免像控航空摄影测量作业。

二、飞行器特点
Phantom 4 RTK是一款小型多旋翼高精度航测无人机,面向低空摄影测量应用,具备厘米级导航定位系统和高性能成像系统,便携易用,全面提升航测效率。
-
小型无人机,便于携带。一人一机,轻松作业。
-
一体化地面站遥控器,高清实时图传,全智能式航线规划。
-
支持一键导入KML文件,快速确定作业区域。
-
全自主飞行作业,配合自主避障,保障作业安全。

三、Ubase特点
UBase是中海达集团2016 年推出,2017~2018 年进行全面优化的智能小型化RTK 系统,作为PPK后处理差分基站;同时可以连接千寻用于布设像控点以及检核精度使用;产品一体化,强固机身设计,三防设计。
-
新一代高精度航测基站。
-
小型化RTK系统,简易便携。
-
电台高频段通讯,最大程度减少外界干扰。
-
一键式操作,配备Hi-UAV手簿软件,传统、航测两无忧。


四、后处理软件
1. UAV-PPK软件是一款桌面端航测后处理软件,一键式数据导入、坐标转换、后差分解算、结果导出等功能模块。采用先进的EventMark差值算法,给用户提供更加可靠的定位精度。
-
一键式数据归集,数据解算。
-
EventMark算法,对每组数据进行两次解算,保证精度。
-
AI式更新模式,无需人为干预,时时刻刻保证您的软件版本为最新状态。
-
高效快拼功能,10min生成高清晰正射影像。

2. Hi-Data航测软件,是基于自主版权的HiData数据平台研发的产品,提供二三维数据采集、编辑、调绘、入库到更新等一整套数据生成解决方案。软件功能主要包含项目管理、图层管理、数据转换、地图操作与输出、数据采集、数据编制、数据加工、数据入库、数据交互、影像处理、配置工具、界面配置工具、坐标工具、注册管理等。
1、基础版+正射影像(测图模块)
基于正射影像DOM 和实景表面模型的源数据测图。
2、基础版+三维倾斜(测图模块)
基于倾斜摄影生成的实景三维模型及倾斜相片等源数据测图。
3、基础版+三维点云(测图模块)
基于各种地面激光扫描、机载Lidar、测量车、无人机等点云数据测图。
二、外业作业流程

-
外业——测区确定
1.向甲方直接获取KML文件。
2.与甲方沟通,确定作业区域,在Google Earth中框出,导出为KML格式。
3.到达现场,与甲方沟通,现场确定,在遥控器上框出。
-
外业——相控(检查)点的布设
建议飞行外延线外不要打点,选点应在测区范围线内均匀分布,宜选在空旷平地上。
-
不宜在房屋、牌楼、花圃、树木等地物拐角处选点,因立体影像容易拉花,影响内业刺点精度。
-
选点不宜选在汽车车位处,防止汽车遮挡点位,影响内业刺点精度。
-
建议按规范打点,点位精度不准确,最终影响成图精度。




-
外业——基站架设
-
一定需要对脚架进行对中整平,并使其稳定不晃动。
-
作业完成后量取基站斜高或者通过Hi-UAV测出基站点。
-
最好将基站对中点做出明显标记,以防测量出错后无法补救。
------------------------------
-
基站斜高量取方式
如图所示:
斜高为地面基准点点位至“测量基准件”外延上端面直线距离,读数精确到毫米位,如图所示斜高为——1.487m。


------------------------------------
-
外业——坐标获取
通过手机APP——Hi-UAV连接Ubase。
-
进入碎部测量平滑采点。
-
进入原始数据导出坐标。




-
外业——飞行
一键起飞作业。
---------------------------外业结束------------------------
三、 使用UAV-PPK软件解算高精度POS流程
uav-ppk软件特色:
uav-ppk软件支持直接导入大疆Phantom 4 RTK的机载端自动记录的数据PPKRAW.bin、拍照点时刻文件Timestamp.MRK,无需其他工具转换,增加工作效率
uav-ppk软件支持多架次合并解算,一个基站可以同时对应多个移动站文件,可根据具体数据自调整配置参数,实现一键操作
uav-ppk软件支持导入照片文件夹,解算完成后,生成pos点与照片一一匹配,同时生成可直接导入Smart3D、PIX4D、DP-Smart等主流数据处理能直接调用的数据读取文件
uav-ppk软件采用自主高精度的PPK算法,可视化程度高,解算过程中,解状态等一目了然。支持前向与后向解算,双重保障,采用高精度的插值算法,POS精度更可靠,平面、在线地图一键切换
uav-ppk软件解算静态数据固定率大于99%,支持拍照点POS数据导出解状态显示,共用卫星显示,提高解算结果可靠性,更放心
uav-ppk软件支持任意坐标转换,实现源椭球到目标椭球的转换,直接生成目标坐标系统坐标,同时支持参数计算和坐标批量转换
uav-ppk软件具有快速图像处理功能,生成的DOM、DSM文件可导入HiData、EPS等软件进行二维、三维测图操作,生成的图像处理报告可快速进行外业质量评估
uav-ppk软件可进行矢量图操作,可以图上展点、图上刺点、图上推演、面积测量与距离测量,可用于快速救援、农林牧渔等应急场景
uav-ppk软件支持输出目标椭球大地坐标,有利于给Smart3d软件输出任意椭球的平面坐标,满足客户对目标椭球的需要
uav-ppk软件支持联网自动升级功能,当电脑可以上网时,启动软件后台检测到新版本发布会自动更新,获取更优体验
一、外业数据准备
软件使用之前应按要求准备以下数据:
本软件全流程操作所相关的文件、文件夹、路径等不能出现中文字符和非法字符。(建议新建一个文本文件,包含基站坐标、斜高、机身号、坐标系及中央子午线等信息,方便内业使用)
|
UAV-PPK软件相关 |
已安装好的UAV-PPK V2.0.10软件 (pan.zhdrtk.com,ubase文件夹里有下载链接) |
|
基站机身号(UBase对应的S/N号) |
|
|
基站机身号相对应的有效注册码 |
|
|
外业采集数据 |
基站静态文件“XXX.GNS”(基站文件时间为关机时间,注意正确匹配对应移动站文件) |
|
基站对应的基站坐标(须知成果所需坐标系及中央子午线),基站点斜高 |
|
|
原始野外采集像片 |
|
|
移动站静态“XXX_PPKRAW.bin” |
|
|
拍照点文件“XXX_Timestamp.MRK” |
|
|
注:像片文件和移动站文件、拍照点文件在P4R原始数据同一个文件目录下面 |
|
1.将飞机开机直接连接电脑或者用读卡器读取SD卡。
2.将DCIM-SURVEY中的架次文件夹拷贝出来。
3.将Ubase通过数据线连接电脑,将static文件夹下的基站文件拷出(.GNS文件)。
二、软件注册许可。
双击“UAV-PPK”软件图标即可打开软件,软件提醒“正在更新”;软件支持联网在线升级功能,打开即可更新,获取更优体验。

打开安装好的UAV-PPK软件后,选择上方菜单栏帮助选项,点击下拉栏的注册按钮,出现注册框,如图所示,输入所需注册对应的UBase机身号和注册码,点击注册即可成功注册。

三、解算数据
-
点击左侧向导栏“导入数据”,出现导入数据框,进行数据导入操作。导入基站静态文件:点击“导入”,选择所对应的基站文件,格式“XXX.GNS”,选择导入即可。
-
同理,将移动站文件和拍照点文件导入软件,如需导入多架次移动站和拍照点文件,只需按顺序依次导入数据文件即;
软件移动站数据支持直接导入大疆Phantom4 RTK的机载端数据PPKRAW.bin、拍照点时刻文件Timestamp.MRK,无需其他工具转换,增加工作效率。
-
导入像片文件夹:应选择像片文件夹所在的文件目录;如需导入多架次像片数据,只需将多架次像片文件夹放在一个大文件夹里面,然后选中大文件夹所在目录即可。
软件支持多架次合并解算,一个基站可以同时对应多个移动站文件,可根据具体数据自动调整配置参数,实现一键操作。
-
所有数据导入成功后,点击“确定”,出现数据导入进度条,等待稍许即可。
-
坐标系统设置椭球选择:源椭球为“WGS84”,目标椭球为成果所需坐标系所在目标椭球,如“国家2000”数据导入成功后自动弹出坐标系统设置框,进行坐标系统参数设置;或者点击左上方菜单栏“坐标系统”设置,自主打开坐标系统设置界面。
-
投影设置:投影方法选择所需成果投影方法,默认为“高斯三度带”投影方法,中央子午线选择测区所在地中央子午线即可。
-
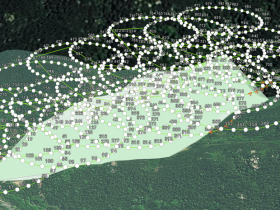
坐标系统设置完成点击“确定”后,软件界面“平面图”框出现外业飞行航线轨迹图。为了确定航线和测区是否对应,可以打开软件“在线地图”,自动定位到航线正中位置,并且可自由切换平面地图和卫星地图,确认测区所在地无误后可进行下一步操作。


9. 点击左侧向导栏“基站”,出现基站设置界面,进行基站设置。
基本信息设置:选择坐标椭球类型,如使用原始“WGS84”坐标,则选择“WGS84”椭球格式,并输入外业实测的基站BLH坐标;如需使用其他坐标系统格式数据,则椭球类型选择“目标椭球”,并输入外业实测目标椭球基站“xyh”坐标。
10.基站天线选择:天线信息软件默认设置为“按接收机类型(iRTK2)”,无需更改,仪器高默认为斜高,并输入斜高值(如其他量取方式对应选择即可),每输入一栏切记要点击保存。
11.点击左侧向导栏“解算全部”,软件自动开始前后向解算,等待解算完成即可。
解算完成后,可以看到所有航线拍照点全部变成绿色的固定解,即表示解算成功。(软件生成的UAV_Result文件夹里photoResults_01.csv也可查看拍照点解状态信息)
-
软件采用自主高精度的PPK算法,可视化程度高,解算过程中,解状态等一目了然。支持前向与后向解算,双重保障,采用高精度的插值算法,POS精度更可靠。
12.点击左侧向导栏“导出结果”,软件弹出导出设置界面,设置好导出文件名和保存路径,软件默认自动命名为“UAV.TXT”并保存在项目文件夹“UAV_Result”里面,固此步骤可以不更改,直接点击“保存”即可。点击“保存”后,等待软件自动导出结果即可,导出过程如下。


-
软件支持照片文件夹导入,解算完成后,生成pos点与照片一一匹配,同时生成可直接导入Smart3D、PIX4D、DP-Smart等主流数据处理软件的格式文件。
|
dip-modeler_01.csv |
DP软件格式POS信息 |
|
Pix4d_SourceBLH_01.txt |
Pix4d软件源椭球BLH坐标格式POS信息 |
|
Pix4d_TargetBLH_01.txt |
Pix4d软件目标椭球BLH坐标格式POS信息 |
|
Pix4d_TargetENZ_01.txt |
Pix4d软件目标椭球ENZ坐标格式POS信息 |
|
Smart3d_01.xls |
Smart3d软件源椭球BLH坐标格式POS信息 |
|
UAV.txt |
所有坐标格式数据源文件 |
13.点击向导栏左侧“图像处理”,软件自动开始快拼,快拼完成后,软件自动弹出“PDF”格式快拼报告,可以查看快拼具体情况。

-
软件快速图像处理功能,生成的DOM、DSM文件可导入HiData、EPS等软件进行二维、三维测图操作,生成的图像处理报告可快速进行外业质量评估。
-
软件可进行矢量图操作,可以图上展点、图上刺点、图上推演、面积测量与距离测量,可用于快速救援、农林牧渔等应急场景。
四. 视频演示
四、 PIX 4D作业流程
1. 数据准备
本软件全流程操作所相关的文件、文件夹、路径等不建议出现中文字符和非法字符。(包括外业飞行照片,通过UAV-PPK解算完成的POS文档,相控点文档)
2. 新建&照片导入
打开PIX 4D,新建项目,选择,导入照片,完成导入。
3. 坐标系确立
首先确认此次作业的目标坐标系(即使用UAV-PPK软件解算后所得到的POS信息坐标系) ,然后根据选项进行坐标系的确定。(注:114E表示的中央子午线114度,不带带号)
4. 导入照片pos
点击从文件中导入UAV-PPK解算出的POS数据,选择打开完成导入。
5. 更改水平精度与垂直精度
将水平精度与垂直精度统一修改为0.1/0.2——右键点击,选择编辑所有项,将精度值进行更改。
6. 选择处理选项模板
选择所需输出文件类型模板,正射影像为3D Maps选项。
7. 快速检测
在全面高精度处理之前,先快速检测一次,目的是为了调整相机焦距。
8. 优化焦距
在快速检测完成后,会弹出质量报告,将如图所示位置的新相机焦距重新填入图像属性编辑器中。
9. 刺点
刺点——点击GCP/MTP管理,出现对话框。点击导入控制点,在出来的对话框中选择要导入的控制点文件,文件格式可以为.txt 或.csv,然后确定。在GCP/MTP管理器中可以看到标签栏前面都是0,那说明这些控制点还没有刺点,那下一步所要做的就是需要把这些控制点和图像相关联。具体操作顺序如图:

10. 高精度处理+dsm+dom
完成后进行全面高精度处理——将三个本地处理全部勾选,并将初始化处理-常规-全面高精度处理选中,开始处理。
11. 精度对照
处理完成后选择镶嵌图编辑器,查看正射影像对比精度,得到精度报告。

5. Hi-data操作流程

-
数据准备
-
数字正射影像(DOM): 利用数字高程模型对航片进行数字微分纠正和镶嵌,按一定图幅范围裁剪生成的影像集。同时具有地图几何精度和影像特征的图像。

-
数字高程模型(DEM):DEM是高程信息,是地表的模拟。

-
数字表面模型(DSM):地物表面的模拟,包括植被表面、房屋的表对DSM面进
-
行加工,去掉房屋、植被等信息,可以形成DEM。支持tif、img和hdc格式
-
三维模型:
osgb、osg、obj、ive、s3c和 3ds格式以及其他的测量数据,dat等格式
2. 注册软件



3. 软件启动

4. 新建项目
【新建】是新 建工程模板的工具,通过新建工程,就可以加载影像、测量数据或其他数据进行绘图和编辑
建工程模板的工具,通过新建工程,就可以加载影像、测量数据或其他数据进行绘图和编辑
5. 数据导入



6. 地物绘制

7. 属性编辑录入

8. 数据导出、保存


六、 注意事项
1、 外业飞行注意事项:
-
飞机与飞手的距离必须大于安全距离(3m)。
-
飞行前确认飞行场地空旷,无高楼、高压线等存在炸机隐患的地物,无来往车辆,行人较少且地势较平坦。
-
每次起飞前,需确认模式已切换P挡,并且确认飞机端桨叶上紧,电池卡紧。
-
起飞前确认任务拍摄模式为定距拍照,完成动作为返航,畸变修正是否打开,重叠率是否合适。
-
手操时对飞机进行左右旋转与前后左右操作时需动作柔和,不要使飞机出现剧烈的姿态变化。
-
飞手必须与机尾灯对视,不得出现乱向站位。
-
降落时首先确定飞机落点,落点需平坦无凸起凹陷。
-
飞机落地后,先关闭飞机电源,再关闭遥控器电源。
2. 内业数据处理注意事项
-
将飞机直接连接电脑导出数据时,请千万记住在开机前取下云台锁扣与保护罩,以免开机过程中云台自检造成电机损坏。
-
数据下载完成后,检查照片、移动站文件、拍照点文件是否完整/无误。
-
在UAV-PPK软件中设置基站坐标后,记得点击保存。
-
基站天线里接收机类型选择iRTK2,并在基站高设置完后,依次保存(共3个)。
点击软件左上方菜单栏文件,下拉选择“新建项目”,出现新建项目框,输入项目名称和项目保存路径(不得出现中文字符和非法字符),点击确认即可。