 无人机航测技术
无人机航测技术
近几年,无人机航测在地信测绘的应用越来越火,关于无人机航测作业流程,你会几个?下面,我们一起来看一看。 外业航飞 01 现场勘查 作业员需要对测区...
07月30日
 ContextCapture三维建模
ContextCapture三维建模
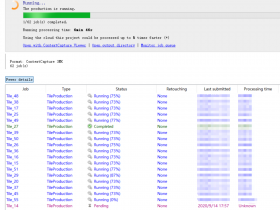
ContextCapture使用总结 一、 基本流程 1、 打开ContextCapture Center Master打开CC新建新工程,工程名称需要使用英文,指定工程目录。 2、 添加影像 添加影...
05月06日
 无人机航测技术
无人机航测技术
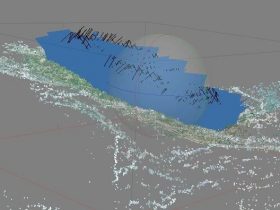
本文记录如何使用Smart3D软件(即ContextCapture)对倾斜摄影所得的照片进行实景建模。 准备工作:倾斜摄影采集的照片和smart3D软件 写在前面的总结: 整个项目过程主...
05月06日
 无人机航测技术
无人机航测技术
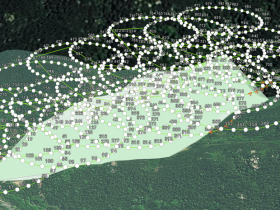
无人机倾斜摄影测量介绍 无人机航测是传统航空摄影测量手段的有力补充,具有机动灵活、高效快速、精细准确、作业成本低、适用范围广、生产周期短等特点,在小区域和飞行困难地区高分辨率影像快速获取...
04月22日
 无人机航测技术
无人机航测技术
环绕飞行倾斜建模常见问题解答 “采用环绕飞行的方式进行倾斜摄影测量可以大幅度减少照片数量,提高建模效率,节省建模时间。”这句话是用户在咨询环绕飞行倾斜建模时我们回复最频繁的一句话,然而很多问题难以用一...
04月16日
 smart3D
smart3D
引言 现阶段,航测作业主要分为外业和内业两个方面。而老话说得好,工欲善其事,必先利其器,外业数据采集工作需要熟练稳重的飞手,搭配上安全稳定的飞机和性能卓越、工作稳定的相机。同样地,内业数据处理也需要经...
09月22日
 smart3D
smart3D
ContextCapture是一款优秀的三维建模的软件,但是因为ContextCapture处理的空三能力比较弱,导致后期模型效果差的情况。所以就出现了用空三能力强的PhotoScan软件做空三,然后...
07月22日
 无人机航测技术
无人机航测技术
01 背景介绍 众所周知,用于建立三维模型的航测数据必须符合一定的要求,最重要的一点是要保证用于建模的相片数据与pos数...
06月15日
 smart3D
smart3D
当我们想一起展示相邻区域的模型分多次建模后的模型成果时,或同一区域的数据因数据量太大,需分块空三建模时,都需要通过模型合并来输出一个完整的成果。 那么,关于Context Capture模型合并,你是...
05月08日
 无人机航测技术
无人机航测技术
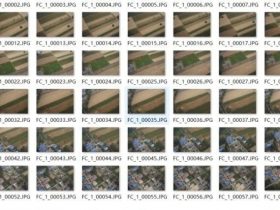
前言 在近期photoscan很多朋友问如何利用五镜头数据导入photoscan,通过这一段时间摸索,现在把本人方法公布给大家做参考,如果有更好的方法,欢迎讨论。(本案例以倾斜相机为案例...
08月15日







