作业员需要对测区周围进行踏勘,收集地形地貌信息,以及周边的重要设备和交通信息,为无人机的起飞、降落、航线规划提供资料。对于大城市、机场或高海拔地区,航测之前首先应申请空域。
在进行外业航飞之前,应该根据已知的测区资料和相关数据对无人机系统的性能进行评估,判断飞行环境是否满足飞机的飞行要求,影响无人机飞行的因素主要包括以下四方面。
在进行航飞前,应对所有的设备、装置进行检查,主要包括航测相机的检校,飞机性能的检测,电池的电量,飞机内部各部件之间的紧密、电台、GPS等。在环境复杂的山区航飞时,为了防止飞机丢失,可以在飞机上配置移动定位设备。对于弹射起步的无人机,还应检查弹射架的状况。
像片比例尺定义为像片上的线段与地面上相应水平线段之比:
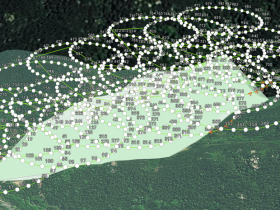
无人机航迹规划是任务规划的核心内容,需要综合应用导航技术、地图信息技术以及远程感知技术,以获得全面详细的无人机飞行现状以及环境信息,结合无人机自身技术指标特点,按照一定的航迹规划方法,制定最优或次优路径。因此,航迹规划需要充分考速电子地图的选取、标会、航线预定规划以及在线调整时机。
摄影测量外业控制测量是在测区内测定用于内业几何定位的影像控制点的平面位置和高程值,是内业影像解析和测图的基础,主要目的为计算待求点的平面位置、高程和像片外方位元素,达到影像和实际地物的正射投影。

像控点的测量一般采用“GPS RTK”的方法,因为GPS测量结果使用的是WGS-84坐标系统,若项目要求测量成果使用其他坐标系统,则需要在观测之前进行坐标系转换,求出WGS-84坐标系与目标坐标系之间的转换关系。