
文章授权转载于海洋GISer成长记
本文共分4部分
01.影像数据的获取
02.Pix4D UVA正射教程
03.Pix4D Mapper倾斜三维教程
04.Contexcapture(Smart3D)倾斜正射教程
近年来消费级无人机使用越来越普遍,用来干测绘的门槛也越来越低。随便拿台大疆四旋翼无人机,配上免费的第三方航线规划软件,再用网上到处能下载的无人机影像处理软件,就能轻松生成正射影像和倾斜三维模型。今天以大疆精灵系列无人机为例,主要介绍使用Pix4dCapture和Altizure软件进行无人机正射和倾斜三维影像数据获取,后续文章再单独介绍无人机影像数据处理。

大疆精灵4 RTK版——无人机测绘神器
大疆精灵4 RTK版使用介绍戳这里。
1、飞行前准备
首先准备一台大疆精灵系列无人机(精灵3和4普通版都可以),在手机或平板电脑上安装对应的DJI Go飞控软件(现在都需要注册一个账号并登陆才能使用),在DJI Go软件中做好常规的设置,比如飞行限高和遥控器操控手等,并确保固件已升级,可以正常飞行。
在手机或平板电脑上安装Pix4dCapture或Altizure,这两款都是免费的app,在行业内使用比较广泛。

DJI GO软件操控界面
2、Pix4dCapture软件介绍
Pix4Dcapture是瑞士Pix4D公司基于深圳大疆、法国Parrot消费级飞行器研发的一款航测数据智能采集软件。软件分为4个模块:Grid(正射影像采集)、Double Grid(三维模型采集)、Circular(热点环绕)、Free Flight(自由飞行)。 通过Pix4D公司的云处理服务或桌面级专业数据处理软件Pix4Dmapper,不仅可以制作正射影像图、实景三维模型、还可以构建较为精细的单建筑实景三维模型和建筑立面影像,使消费级飞行器摇身一变,成为强大的地图测绘工具。
Pix4Dcapture是免费软件,可以在安卓和IOS系统中运行(安卓版需要另外安装Ctrl+DJI软件),支持大疆精灵系列无人机(其他系列也有些支持);Pix4Dmapper为付费软件(网上很多和谐版),可以桌面版运行也可以提交数据至云服务平台运行,Pix4Dmapper软件后续文章单独介绍。
使用Pix4Dcapture软件之前,需要先启动DJI GO软件,确保无人机可以正常起飞。然后拔出USB数据线,重新连接,会出现下面的提示,千万不要勾选“下次默认选择此项,不再提示”,勾了就不再提示选择软件了,这里选择Pix4Dcapture软件。

启动Pix4Dcapture软件,需要先注册并登陆Pix4D账号。

登陆后,选择使用的无人机型号后,弹出任务规划界面,这里提供多种类型的任务规划。

上图是Pix4Dcapture支持的任务选项,第一和第二个是正射航线规划,第三个是三维航线规划,第四个是环绕飞行,第五个是自由飞行(定时或定距拍照)。就测绘应用而言,正射航线规划和三维航线规划应用较多,但Pix4Dcapture的三维航线仅飞交叉航线(只飞行2遍),相对于Altizure软件飞行5条航线的三维效果而言,不建议使用Pix4Dcapture飞三维航线。下面主要介绍使用Pix4Dcapture软件进行正射影像数据获取。
Pix4Dcapture软件正射航线规划支持多边形和矩形范围规划,其中多边形范围规划比较实用,可以通过手动设置飞行范围,调整参数进行正射航线规划。

正射航线规划时,需要将无人机相机镜头设置成90度,垂直向下拍摄;设定飞行高度,为保证安全飞行以及影像分辨率,建议飞行相对高度设置在120m以内;航向重叠(Front overlap)设置70%以上,旁向重叠(Side overlap)设置成60%以上。设置完成后,保存任务,准备起飞。

Pix4Dcapture软件进行上述检查后,长按起飞按钮3秒,无人机即可自动起飞并按照设定航线进行照片拍摄。以上起飞过程也支持先采用DJI GO软件将无人机起飞悬停后,再切换到Pix4Dcapture软件进行任务上传,上传后无人机根据设定航线执行飞行任务。
无人机执行飞行任务过程中,通过Pix4Dcapture软件可以随时监控无人机位置及状态,是否拍照,飞行过程中电量不足也会自动提醒返航。

飞行任务执行完后,无人机拍摄的照片存储在无人机SD卡中,也可以将拍摄照片下载到手机或平板电脑检查拍摄效果,也可以直接将SD卡中的照片拷贝到电脑上查看。飞行POS数据记录在对应的照片文件中。

3、Altizure软件介绍
Altizure app是由 Altizure.com 设计的一款无人机辅助拍照软件。Altizure软件可以控制飞机在设定路径上飞行并进行定时拍照,,以自动采集五个方向的图片用作倾斜摄影,然后生成实景真三维模型,当然,也可以更有效地只拍一个垂直方向生成正射影像。由于Altizure只支持矩形范围航线设计,因此正射航线规划功能没有Pix4Dcapture软件好用,下面主要介绍使用Altizure软件进行倾斜三维影像获取。
跟使用Pix4Dcapture软件一样,使用Altizure软件前,先打开DJI GO软件,确保飞机可以正常起飞,然后拔出USB连接线,并重新连接,进入Altizure软件。

单击左侧最上面的按钮进行航线规划。

手动调整飞行范围,设置飞行高度、航向重叠和旁向重叠等,软件自动生成5条飞行航线,通过单击下面的数字进行航线切换和信息查看。第一条航线是无人机垂直向下拍摄,第二到第五条航线是相机朝测量区域中心位置倾斜一定角度(45度左右)进行拍照。

航线设置完成后开始任务,单击左侧中间的起飞按钮自动执行数据采集任务。当飞行完一条航线后,飞机会悬停在终点,Altizure软件里会弹出窗口询问下一步操作。此时你可以查看电池电量来决定是否直接开始下一条航线飞行或是自动返航。
无人机飞行拍摄的照片同样存储在无人机SD卡中,需要拷贝到电脑中进行后续数据处理。
4、像控点测量
以上介绍了使用Pix4Dcapture软件和Altizure软件规划消费机无人机进行正射影像和倾斜三维影像的数据获取,若想要后期处理得到高精度的正射影像或倾斜三维模型,还需要进行像控点测量(使用大疆精灵4 RTK版不需要测量像控点)。
像控点测量通常使用GPS RTK进行,这个需要专业的仪器设备和测绘资质。像控点测量可以选取飞行区域明显的地物特征点,如道路交叉点,明显建筑物拐点等,也可以飞行前自己布设像控点标志。像控点尽量均匀选取,并覆盖整个飞行区域。

像控点标志
若不进行像控点测量,直接对无人机影像数据进行处理,也可以得到飞行区域各地物之间的相对位置关系,但是绝对位置存在10米左右的偏差。
5、小结
1)建议使用Pix4Dcapture软件获取正射影像,使用Altizure软件获取倾斜三维影像;
2)Pix4Dcapture和Altizure都需要配合DJI GO软件使用,其中Pix4Dcapture安卓版还需要安装Ctrl+DJI软件,通过插拔USB连接线进行各软件的切换,千万不要勾选“下次默认选择此项,不再提示”;
3、不论通过何种软件(第三方软件或DJI GO手动拍摄)获取的大疆无人机照片,其POS数据均已写入到了照片的EXIF信息中,后期影像处理软件都可以自动识别;
4、以上截图及资料均来源于网络,仅作学习交流用,如有侵权请告知。
上篇文章“软件经验|使用消费级无人机干测绘(二)Pix4Dmapper介绍”有些问题,主要是把Pix4UAV软件直接当成了Pix4Dmapper软件介绍。考虑到Pix4UAV软件是Pix4Dmapper软件的早期版本,虽然二者功能相似,但还是存在不一致的地方。





Pix4UAV软件是瑞士Pix4D公司的全自动快速无人机数据处理软件,是目前市场上独一无二的集全自动、快速、专业精度为一体的无人机数据和航空影像处理软件。无需专业知识,无需人工干预,即可将数千张影像快速制作成专业的、精确的正射影像和三维模型。

根据个人应用经验,使用大疆消费级无人机照片生成正射影像优先推荐Pix4UAV软件,理由是快速+专业+全自动。当然美国Bentley公司的ContexCapture(原来叫Smart 3D)软件生成正射影像功能更强大,后续文章也会单独介绍,但个人觉得Pix4UAV更适合普通玩家。
1、新建项目

2、添加照片,注意照片目录不要有中文。

3、自动识别照片POS信息,主要识别照片位置信息。

4、照片添加完成后,将拍照点位显示在地图上。

单击Georeference菜单下的"GCP Editor"子菜单,弹出下面对话框,根据现场测量像控点情况刺像控点。若没有现场测量像控点,跳过该步骤,仍可进行正射影像拼接,只是拼接的正射影像误差相对较大,尤其是绝对位置偏差较大。

单击Process菜单下的”Local processing“(本地处理)子菜单,在地图界面下方会出现参数设置界面(Cloud processing是云处理模式,需要购买账号,然后将照片上传到云服务器上处理)。
1、Initial project processing(初始处理)可以选择”Rapid“(快速)处理也可以选择”Full“(高精度)处理,”Rapid“处理是快拼,速度快但处理精度相对较低;”Full“处理则相反,处理速度较慢,但精度较高。

2、Point cloud densification(点云/空三加密)中3D点云加密可以选择高、中、低三种,耗时依次减少。如果快拼的话建议选低加密模式。
3、Orthomosaic and DSM generation(正射影像和数字表面模型生成)该选项仅一个Resolution(分辨率),这个可以根据影像自动计算,无需手动设置。
设置完参数,单击运行。运行完第一步(Initial project processing)后,在地图窗口右侧会生成Quality Report(质量报告)。
质量报告包括整体情况介绍(相机型号,分辨率,覆盖范围,坐标系,投影以及运算耗时等)和质量检查情况。

质量报告还包括空三加密前的正射影像和DSM预览图。

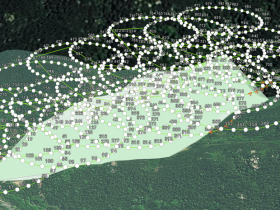
质量报告还包括照片拍摄的航迹点、航迹线以及拍摄起点(加粗的红点为起点)。

质量报告还包括照片重叠度检查,红颜色表示重叠度不够。

质量报告还包括二维连接点示意图,连线颜色越深代表连接点匹配越好。

拼接过程全自动,无需人工干预。拼接完成后,正射影像(tif格式)会导出至指定目录下,并加载到地图窗口中,同时导出的文件还包括DSM文件(tif格式)和点云文件(laz格式)等。

若对自动拼接的正射影像结果不满意,单击View菜单下的”Scene editor“子菜单,弹出场景编辑窗口。这里提供的功能主要是替换生成正射影像或高程模型的照片。

以上,一幅正射影像已经拼接完成了,若要得到更高精度的正射影像,建议:
1、现场测量像控点并添加到Pix4UAV软件中,可以较大程度提高正射影像精度,尤其是绝对位置精度;
2、Initial project processing(初始处理)选择”Full“(高精度)处理模式,同时Point cloud densification(点云/空三加密)中3D点云加密选择高加密模式,这种设置运行比较费时;
3、对初步生成的DSM进行手动编辑后再导入重新生成正射影像,该操作太专业,且需要第三方软件;
4、选择更高质量的相机镜头,当然,无人机平台也要随改变。
但对于普通玩家而言,采用Pix4UAV软件进行全自动快速拼接生成的正射影像已基本能满足各种需求了。
上篇文章介绍了使用Pix4UAV软件进行大疆消费级无人机正射影像拼接,今天主要介绍Pix4UAV软件的升级版Pix4Dmapper软件的常见功能,包括正射影像拼接和倾斜三维建模。






Pix4Dmapper是瑞士Pix4D公司的全自动快速无人机数据处理软件,是目前市场上独一无二的集全自动、快速、专业精度为一体的无人机数据和航空影像处理软件。无需专业知识,无需人工干预,即可将数千张影像快速制作成专业的、精确的二维地图和三维模型,该软件可从航拍片中利用摄影测量与多目重建的原理快速获取点云数据,并进行后期的加工处理。加工处理后的应用,可惠及不同行业,例如测绘、文物保护、矿业等等。应用领域包括航测制图、灾害应急、安全执法、农林监测、水利防汛、电力巡线、海洋环境、高校科研、军事等多个领域。

打开Pix4Dmapper软件。

单击“项目”-“新项目”子菜单,填写项目名称,存储路径等信息。

导入大疆无人机获取的照片。

软件自动读取照片位置信息。

选择3D地图模板为正射影像拼接,选择3D模型模板为倾斜三维建模。

设置坐标系和投影,默认为WGS84坐标系,UTM投影,通常不需要修改。

坐标系设置完成后,无人机照片根据拍摄位置展点到地图上。

单击“项目”-“控制点/手动连接点编辑器”子菜单,添加像控点。没有像控点数据也可以不添加。

单击地图窗口下面“本地处理”下的“选项”按钮,弹出“处理选项”窗口,这里可以进行各选项设置,通常无需手动设置,只需要选择对应的模板。

在“处理选项”对话框左下角有一个“加载模板”按钮,这里内置了各种模板对应的选项,只需选择模板即可(内置模板与新建项目中的“处理选项模板”对应)。这里选择“3D地图”或“3D地图-快速/低分辨率”模板,进入正射影像拼接功能。

单击“开始”按钮,进入初始化处理阶段,待该阶段处理完成会弹出一个质量报告(质量报告详细介绍戳这里),同时自动进入下一步处理。

处理过程可以查看三维视图。

处理完成后得到数字正射影像图(DOM)。

以及数字地表模型(DSM)。

单击“运行”菜单中的“生成谷歌地图瓦片、KML和Mapbox瓦片”子菜单,可以将拼接的正射影像导出成KML格式的地图瓦片,可以加载到谷歌地球软件中查看。

以上,正射影像拼接工作已完成。
新建工程时,导入大疆无人机五个飞行航线获取的倾斜三维照片,在处理选项模板中选择“3D模型”或“3D模型-快速/低分辨率”模板,进入倾斜三维建模功能。

倾斜三维照片拍摄位置展点图。

单击地图窗口下面“本地处理”下的“开始”按钮,自动进行初始化处理和点云及纹理生成,与生成正射影像类似,初始化处理完成,弹出质量报告,并继续生成点云及纹理,待点云及纹理生成完成后,在地图窗口左侧列表中,勾选“点云”-“加密的点云”,地图窗口会显示三维点云叠加影像的三维预览图,如下图所示。

截止到目前,只生成了三维点云数据,倾斜三维模型还未生成。需要单击“运行”菜单下的“生成三维网格纹理”子菜单,待运行完成才能生成三维模型。生成的三维模型在项目路径下的“2_densification”-
“3d_mesh“文件夹下,为obj格式,可以使用ContexCapture Acute3D Viewer软件、3d max 软件等通用三维软件打开。

以上,倾斜三维建模工作已完成。
1、非专业应用无需添加像控点,无像控点主要是绝对位置偏差稍大;
2、处理选项模板中的“快速/低分辨率”模板是快速处理模式,处理速度快很多,但是精度会差不少;
3、相同无人机数据情况下pix4dmapper倾斜三维建模精度比Contexcapture 软件要差些,三维建模推荐使用Contexcapture 软件。
倾斜摄影测量技术是国际测绘遥感领域近年发展起来的一项高新技术,以大范围、高精度、高清晰的方式全面感知复杂场景,通过高效的数据采集设备及专业的数据处理流程生成的数据成果直观反映地物的外观、位置、高度等属性,为真实效果和测绘级精度提供保证。三维建模在测绘行业、城市规划行业、旅游业、甚至电商业等的行业应用越来越广泛,越来越深入。

ContextCapture是Bentley公司于2015年收购的法国Acute3D公司的产品。借助ContextCapture软件,无需昂贵的专业化设备,只需利用普通照片即可快速重建各种类型基础设施项目的现状三维模型。使用这些细节丰富的高精度三维实景网格模型,可在基础设施项目的整个生命周期内为设计、施工和运营决策提供精确的现实环境背景参考。
ContextCapture有两个版本,一个是普通版ContextCapture,另一个是中心版ContextCapture Center。顾名思义,后者可以进行集群计算,而且提供了水面约束功能以及提供SDK,而普通版除了没有这些功能外,对数据量也有要求。

目前比较主流的三维建模软件除了Bently公司的ContextCapture外,还有俄罗斯Agisoft公司的PhotoScan,瑞士Pix4D公司Pix4Dmapper。这几个三维建模软件各有优缺点,PhotoScan比较轻量级,但是生成的模型纹理效果不是太理想,Smart3D生成的三维模型效果最为理想,人工修复工作量较低,但是软件比较复杂,不易上手且价格较高,而Pix4Dmapper则位于二者之间。

ContextCapture软件包括Master(主控台)、Setting(设置)、Engine(引擎)、Viewer(浏览)等几部分,下图为软件安装完成后桌面生成的快捷方式。

Setting: 一个中间媒介,它主要是帮助Engine指向任务的路径。
Master:主要的人机交互界面,相当于一个管理者,它创建任务、管理任务、监视任务的精度等。
Engine:只负责对所指向的Job Queue中任务进行处理,可以独立鱼Master打开或者关闭。
Viewer:可预览生成的三维场景和模型。
双击运行ContextCapture Master,出现如下界面。运行Master之前,最好先启动ContextCapture Engine。

单击“New Project”新建项目。输入项目名称,存储路径等信息。

新建项目后,选择Photos选项卡,然后单击Add photos按钮,添加要建模的无人机照片,照片添加完后,自动读取照片位置信息。

照片添加完成后,单击Check image files按钮,检查照片文件。

检查完照片,选择Surveys选项卡,单击Edit control points按钮,添加像控点,没有像控点数据可以跳过该步骤。


添加完像控点,选择General选项卡,单击右侧的Submit aerotriangulation按钮,提交空三运算。

弹出空三设置流程,输入空三项目名称。

设置照片位置和空间参考,大疆无人机照片自动位置信息,选择默认的即可。

设置其他参数,通常默认,然后单击Submit提交空三运算。

此时,ContextCapture Engine开始运行空三任务。

同时,ContextCapture Master软件也显示完成进度。

空三运算结束后,单击右下方New reconstruction按钮,开始构建三维模型。

选择Spatital framework选项卡,进行分块设置,不分块很难运行成功。

选择General选项卡,单击Submit New Production按钮,提交新建产品。

对生成的产品命名。

选择产品类型,包括3D mesh(三维网格)、3D point cloud(三维点云)、Orthophoto/DSM(正射影像/数字地表模型)等,三维建模的话选择3D mesh,正射影像的话选Orthophoto/DSM,这里选择3D mesh,然后点击下一步。

生成的三维网格数据格式选择,包括3MX、S3C、OSGB、OBJ、FBX和KML等等,这里选择默认的3MX格式,其他格式都可以,看具体需求。

空间参考系统,通常选择UTM投影。

勾选需要建模的分块后(默认全选),点击下一步。

选择输出目录,然后单击Submit,提交建模任务。

在左侧目录结构中选择最后一个节点,可以查看建模进度。

运行完成后,3MX格式的三维模型导出在设置的成果目录下,使用Acute3D Viewer 可以查看生成的三维模型。

上述三维格式若选择的是KML,则运行结果可以加载到Google Earth软件中。

生成的三维模型加载到Google Earth软件中。

以上,倾斜三维建模完成。
5、生成正射影像
上述步骤生成完三维模型后,可以在此基础上生成正射影像等。选择General选项卡,单击Submit New Production按钮,提交新建产品。

生成产品选择Orthophoto/DSM,然后点击下一步。

这里勾选Orthophoto和DSM,也可以根据需要只勾选其中一项。

空间参考系统,选择UTM投影。

选择Orthophoto/DSM生成范围,默认是生成全部范围。

选择输出路径。

若之前已生成3D mesh产品,则生成Orthophoto/DSM的速度会非常快,生成的成果用Global Mapper软件打开,下图为生成的正射影像。

下图为生成的DSM。

以上正射影像和数字地表模型生成完成 隐藏的文字







2019.8.6 08:53 1F