后方交会是一种常用的定位方式,广泛应用于GNSS定位,航空摄影测量,工业测量和工程测量。传统的后方交会是以测角为主,随着电子测距仪在生产中的普遍应用,距离后方交会定位法日益得到应用。目前,全站仪已逐渐普及,利用全站仪可以方便地同时测角和测边,因此在实际工作中,就存在测边、测角、边角同测后方交会坐标计算方法。在工程测量中,后方交会是测量定位、控制网加密和自由设站法施工放样的重要方法之一。后方交会的原理,定义 1(测角后方交会):后方交会是指仅在未知点 P 上架设仪器,向最低三个或三个以上的已知控制点 A、 B 、C 观测两个水平夹角 α,β,从而计算未知点的坐标。由于测距仪以及全站仪逐渐的广泛使用 ,后方交会 还有如下的两种解释:边长角度同测的后方交会以及仅仅测边后方交会。定义2(测边后方交会):在未知点P 上向控制点 , 观测两个水平距离 PA、PB 的边长 a 、 b ,再利用三边求解三角形,从而加密 P 点的坐标。定义 3(边角同测后方交会):在未知的控制点上 P 上安置仪器,再向已知点 A、B 观测两个边长的距离 以及水平角γ ,进而求得 P 点的坐标。总之,后方交会,就是在未知点设站,通过观测已知点,推算未知点坐标的测量方式。
在测量中常常遇到控制点因建筑物阻挡等其他原因造成不能通视,不得不临时增设测量点来进行测量或工程施工放样。加设控制点方法有许多 ,一种较好的方法是在视野辽阔、通视条件好且不容易受到毁损的未知点上用全站仪向已知点进行观测的后方交会,所以后方交会的应用很广泛。测边后方交会与测角后方交会相比不但精度有明显的提高,而且起算数据对点位中误差的影响也相应减小了。随着测距仪、全站仪的日益普及,测边比测角简单,而且能达到更高的精度,测角后方交会将逐渐被测边或边角同测后方交会所代替。无论从精度还是坐标值的角度看,测边后方交会与边角同测后方交会都十分接近,且测边要比测角简单。天宇全站仪CTS-632R6和CTS-632R10M提供了强大的后方交会功能。以CTS-632R6为例做一下简单介绍。
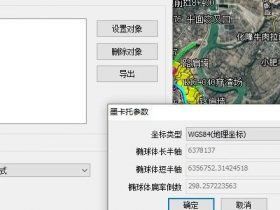
现场已知三个高精度已知点,夹角基本在90度左右。架站,对中整平。开机后按M键,进入测量程序。选择后方交会

给交会点输入点名

选择交会方法,距离后方交会或者角度距离后方交会

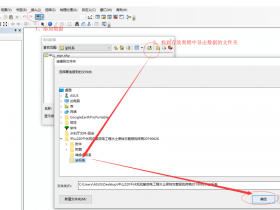
输入已知点1号点的坐标


观测1号点棱镜,同样输入2号点,观测2号点棱镜,得到交会残差和交会点坐标

通过实测,后方交会的坐标误差还是比较小的,可以用于施工测量放样。