1. 设备准备
准备好UBase+ppk解算软件,检查软件注册是否匹配,确保UBase固件是是16.5。
准备大疆P4R无人机,调试软件无误。
准备3组确保满电电池(两组飞行使用,一组做备份)或者场地可以充电
2. 外业作业流程
2.1. 提前勘察现场
时间选择飞行前一天,现场勘察地形,测区观察地物分布,为制定航线最佳路径提供基础。
按照航测规范,在测区用明显标志物提前打好像控点和检查点,并做好点之记(拍照和坐标记录)。选好架设基站的位置做好标识并做好测量(可以使用UBase连接千寻或者当地cors进行测量,基站架设点坐标未知可以通过Hi-UAV软件使用UBase连接千寻或者当地cors进行10次坐标平滑获取基站坐标,注意此方式获取基站架设点坐标一定要输入仪器高)。
提前制定好飞行计划,储存好航线第二天直接就可以飞行。
2.2. 外场作业
将UBase主机经过对中整平架设在已知点上,量好仪器高,需要记录下仪器高,通过Hi-UAV软件将UBase主机设置成采样间隔为0.2秒的静态采集模式,听到开始记录之后结束对主机的操作。
一次飞行时间不超过20分钟,按照航高50米,航速8米/秒,大约飞行面积是0.04平方公里。
规划好的航线飞行结束后,换电池,要再飞至少两条构架航线,主要为了提升高程精度。高度高出主航线的10%,飞两条垂直于主航线航线(前边飞行完的)的构架航线(井字)。
整个过程,UBase不需要关机,一直保持静态数据即可。
如果作业区域没有千寻网络,可使用UBase做单基站提供差分,此时UBase内部插入sim卡,使用Hi-UAV软件设置基站的链路模式为内置网络,同时服务器选择“CORS”,设置IP和端口号(基站用户名、源节点默认是UBase机器号,不需要设置),P4R对应输入与基站设置相同的IP和端口号、用户名、源节点,P4R可使用UBase提供的差分作业。
3. POS点数据处理
使用UBase标配的数据下载线进行数据下载,将UBase主机中当前架次记录的静态文件导出到电脑。
使用P4R标配的数据下载线进行数据下载将P4R的卫星原始观测数据文件和触发数据(拍照点文件)以及照片数据(影像)导出到电脑。
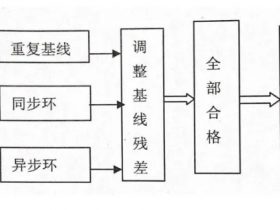
使用ppk解算软件导入以上基准站静态文件、移动端文件、拍照点文件,设置基站坐标、基站天线高,基站天线类型选择IRTK2,设置量测的基站天线斜高(必须输入),设置移动站的天线高,移动站天线高设置为0.17cm(必须输入),设置完后直接点击解算,解算后导出结果文件。使用软件与照片一一对应形成对应后处理软件的输出数据格式。
使用正版PIX4D、DPsmart软件进行正射影像处理,才能达到预期精度。
第一遍处理可以使用免像控处理模式,如精度结果达不到预期,可加入像控点进行二次处理,其中:PIX4D软件要求至少三个,DPSMART要求一个即可。
3.1. 注意
为确保演示质量,即使客户能够自行处理数据,也需要将原始测量数据通过云盘发送李春华,由其统一分发我们的数据内业人员进行同步处理。
在ppk解算软件解算数据的时候
UBase里的数据是一个静态文件
每个架次需要找到对应的找到移动端文件,拍照点文件以及照片数据
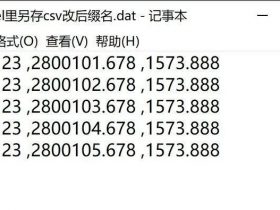
解算完成后,导出结果会生成照片与pos一一对应的文件,飞几个架次需要解算几次,将每个架次的解算完结果保存好。
依照以上步骤解算全部架次飞行数据,将解算成果并入一个文件内(pos与照片一一一对应的文件,格式txt或excel)