2024年1月17日
摘 要:本文简要阐述GPS静态相对定位技术在新建控制网中的应用,结合实例,论述了GPS静态测量中注意的问题,为控制测量工作提供参考。
1 引言
近年来,随着全球卫星定位系统(GPS)技术的快速发展,GPS实时动态测量技术已完全成熟,GPS逐渐在测图、施工放样、航空摄影测量、海洋测绘和地理信息数据采集等方面得到了充分的应用。目前在测量工作中,测量工作者把动态测量作为一种常用的工作方法,但GPS静态测量作为一种经典的测量方法,仍然活跃于测量工作领域的各个方面,特别是在控制测量工作方面的应用。本文将围绕采用GPS静态控制测量工作方法,全面介绍建立GPS控制网的制作过程和方法,并着力阐述GPS静态测量的高效和高精度。
2 静态GPS测量概述
2.1 GPS相对定位原理
用3台或3台以上GPS接收机分别安置在若干条基线的端点,通过同步观测相同GPS卫星来确定多条基线向量。利用这些观测量的不同给合(求差)进行相对定位,可有效的消除或减弱相关误差(如卫星鈡差、卫星星历误差、电离层延迟、对流层延迟等)的影响,故可提高相对位置的精度,从而使这种方法成为精密测量定位中主要的工作方法。
2.2 GPS静态测量的特点
(1)测量精度高
GPS测量的相对精度一般在10-5-10-9,边长精度通常可以达到10-6以上,这是地面常规测量方法很难达到的。
(2)选点灵活,无需通视
由于GPS测量不要求测站间通视,因而选点时只用考虑外业观测条件和应用需求,大大提高了选点的灵活性,使控制网有较好的网形。
(3)可全天候作业
理论上,GPS测量可以在任何时间、任何气候条件下进行。这一特点方便了观测作业,有利按时、高效地完成控制网建立。
(4)操作简便
外业观测和数据处理的自动化程度高,作业人员只需对中、整平、量取天线高、开机设置参数以及必要的记录,剩下的观测工作由接收机自动完成。
(5)可获得三维坐标
GPS测量可以直接测量定点的三维坐标(大地经纬度和大地高)。
3 静态GPS测量应用实例
以广东省某市某镇某村片区GPS控制网为例,简单阐述GPS静态控制和数据处理的原理及应用。
3.1 测区概况
广东省某市某镇测区东以S365省道为边,南到西江,北至山边,面积大约1.1平方公里,地势平坦,交通便捷。
仪器选用三台中海达双频接收机(有效检定期内),作业方式采用混连式。精度指标;其精度满足CJJ73-97所规定的二级平面控制网精度。
3.2 选点、布网
GPS静态观测是若干接收机同时接收卫星信号而进行的定位测量。测站之间不要求互相通视,GPS观测精度与卫星分布有关,与地面测站位置构成的几何现状无关。点位网的形状选择比较灵活,选点工作相对比较简单。因此,GPS点位适当选择,对整个控制测量项目顺利完成有着重要意义。所以,根据本次控制测量的目的、精度、密度要求,在充分收集和了解测区范围、地理位置、气候、交通条件、人文等以及原有控制点的精度、分布和保存情况的基础上,对本区进行GPS点位的选定和布设。
3.2.1 选点原则
根据任务范围和规范的要求,GPS控制网以整个工作范围为准。首先在地形图上进行初选,然后根据初选方案,再进行实地选点,选点应遵守以下原则:
(1)测站周围视野开阔,高度角15度以上不允许有成片的障碍物。测站上应方便安置GPS接收机。
(2)远离大功率的无线电信号发射源(如电台、电视台、微波中继站),与高压输电线、变压器保持50米以上的距离,避免干扰。
(3)测站应远离高楼、围墙、大树、山坡及大面积平静的水面(湖泊、池塘)等能引起较强信号反射物,以免出现严重的多路径效应。
(4)测站应位于地质条件良好、点位稳定、易于保护的地方,并尽可能顾及交通等条件。
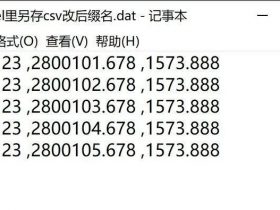
控制点的埋石采用现场浇注的方法进行,事先在选点位置用电钻孔,然后用混凝土将孔填充,最后将标志镶嵌在混凝土中,埋设后,用切割机进行切割,统一编号,编号为;32Ⅱ001,32Ⅱ002,......,32Ⅱ22。具体埋设要求和编号如图1所示。
控制点标志埋设完成后,绘制点之记,并对控制点正面以及点位周围明显地物进行拍照,拍照约4-6张,以表达出点位情况为准,便于以后寻找。

3.3 GPS控制网
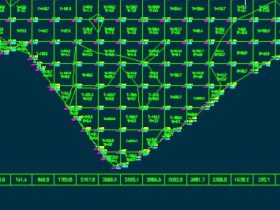
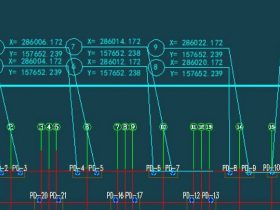
如图2:GPS控制网有34点组成,其中,新布设点22个,原有控制E级点5个,导线点7个,其中32GE04、32GE06、32GE32(均为上级复检最新成果)为起算点。以三角形作为基本图形。
4 外业观测
4.1 外业观测技术要求
以《卫星定位需市测量技术规范》标准中规定的GPSE级点为标准,站点观测大于1.6时段,每个时段大于等于40min。
4.2 观测步骤
(1)安置接收机;将接收机架设在三角架上,进行对中、整平、量取仪器高(仪器高要在接收机互120度方向量三次,互差小于3mm,取平均值)。
(2)开机观测;开机正确设置观测模式(静态)、高度角(15°)和采样间隔(30s)。
(3)观测记录;观测者一律用铅笔及时填写GPS测量手簿各项内容(接收机型号、测站名、时段号、高度角等),手写要认真细致,字迹清晰、工整、美观。
(4)迁站;经认真检查,所有预定的作业项目均已全面完成且符合要求,记录和资料完整无误,方可迁站。
4.3 观测作业组的基本要求
(1)各作业组必须严格遵守调度命令,按规定的时间进行开机、关机的操作。
(2)按要求进行相关观测记录,不得改写和涂改,不得转抄和追记。读写有误时,可用铅笔整齐画掉,将正确数据写在上面并注记原因。
(3)观测期间防止接收机震动,不得移动,要防止工作人员和其他物体碰动接收机或遮挡信号。
(4)观测时,在接收机50m以内不得使用电台,10m以内不得使用对讲机和手机。
(5)观测遇到雷雨天时,应及时停止观测,防止雷击。
(6)在一个时段的观测过程中,不允许进行下列操作:a、关机后重新启动接收机;b、进行仪器自检;c、随意改变截止高度角或采样间隔;d、按键关闭文件或删除文件。
5 静态数据处理
GPS静态数据都有专门的数据处理软件,我们采用的是中海达HGO数据处理软件。
5.1 数据处理流程

图3 数据处理流程图
5.2 项目总结报告(节选)
5.2.1 解算数据
观测文件总数:129;站点个数:34;形成基线总条数:128;形成重复条数:41;合格:41;不合格:0;形成同步环个数:42;合格:42;不合格:0;形成异步环个数:190;合格:190;不合格:0;……。
5.2.2 二维约束平差结果
基线条数:128;平差点数:34;基线标准差置信度(松弛因子):10.00σ;Tau检验显著水平:1.00%;单位权中误差比:1.2098;x2检验值:234.6929;x2理论范围:147.0196-248.4853;x2检验结果:True;
平面四参数:
X平移(m):-1739.54353741482;Y平移(m):75610.6464624293;旋转:-000:14:27.92334;缩放:0.999952395270672;……。
5.2.3 二维约束平差坐标(部分)

……。
平差后最弱边和最弱点
基线名:F6190482.zsd-F6200482.zsd;中误差_DN(mm):2.1;中误差_DE(mm):2.0;中误差(mm):2.9;相对误差:1:69299;站点名:I035;中误差_N(mm):2.8;中误差_E(mm):2.7;点位中误差(mm):3.9。
6 成果检核
为了能够有效确保整个GPS控制网实测精度符合相关的精度值测定要求,GPS控制测量工作完成后,仍需对静态GPS测量成果进行相应的对比工作,采用高精度全站仪(2″以上)对部分相互通视站点进行边长检查,总共对16边进行检核,检核结果如表2。
表2 边长检查表
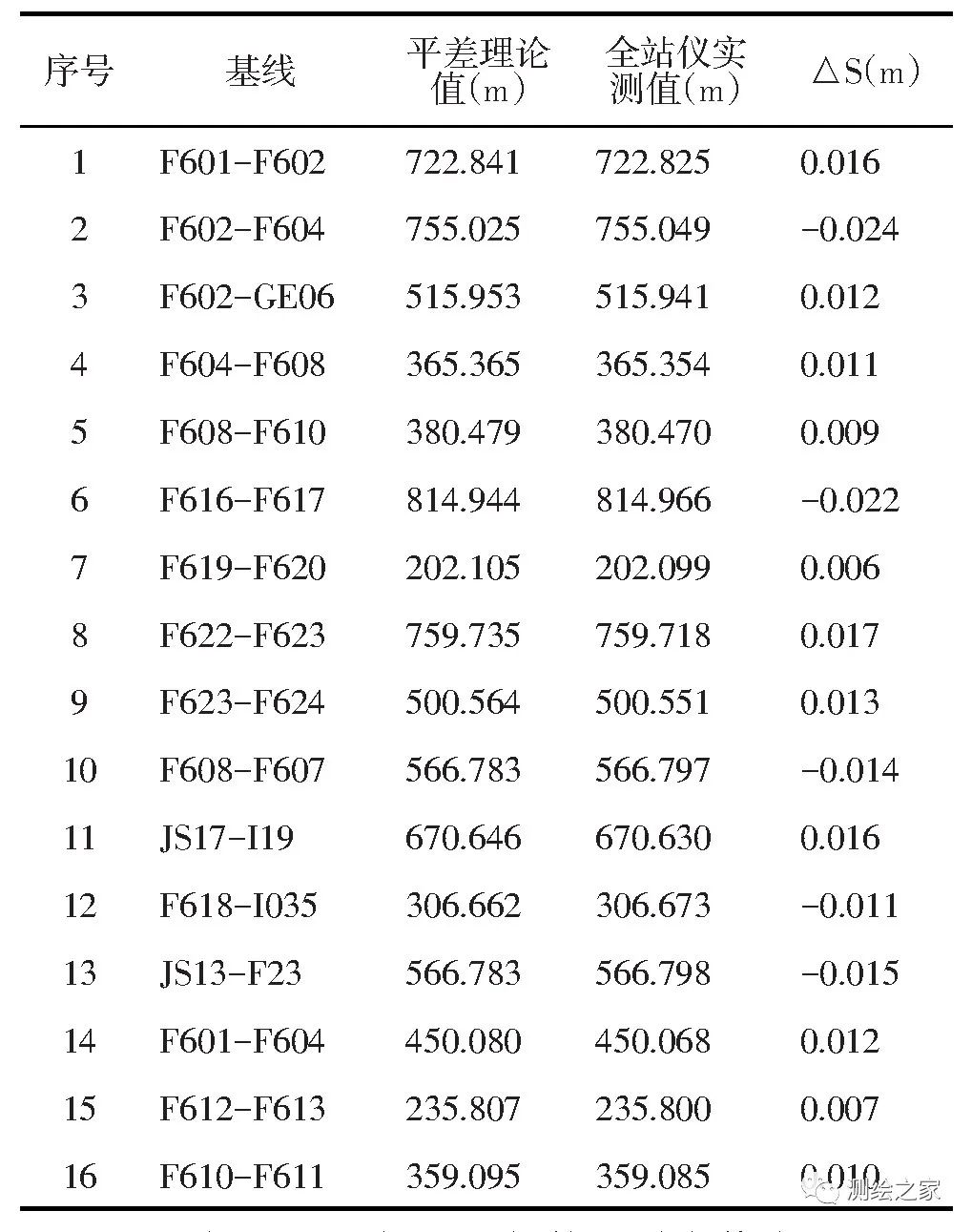
通过表2可以看出:边长较差最大值为0.024m,相对中误差最大为1/31460,满足1/20000的规范要求。
7 探讨
为确保GPS静态测量具有精度高,操作简单,测绘效率高,在控制测量中有很大的优势,在实际工作中应该注意以下几点。
(1)在选点工作中,除了考虑规范要求,还需要关注仪器和观测人员的安全,特别在人员密集和交通要道处,避免观测工作受来往车辆和闲杂人员的影响。
(2)将标志埋设后,用切割机进行切割有一定的危险性,因此,人员前期必须培训或请专业人员,为了保证标志符合规范提高工作效率,我们用钢板制作专用磨具,以方便切割,如图4。
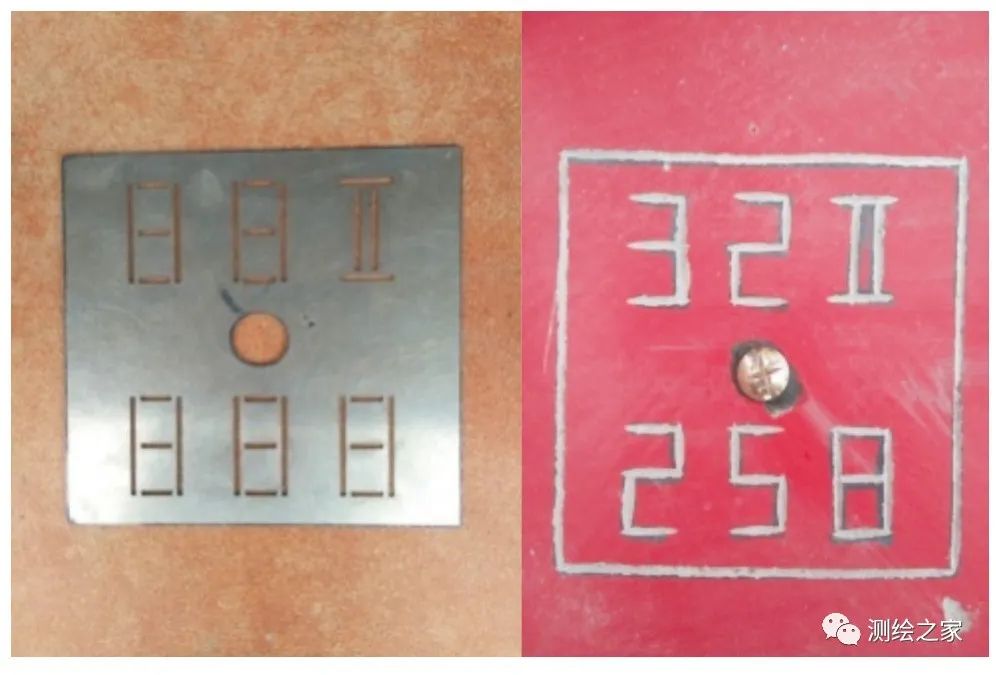
图4 专用磨具及现场效果照片
(3)在外业观测前一定要制定外业观测期间人员、设备、车辆的调度方案,它决定了GPS网的结构,是测量非常关键的环节。各观测小组应注意人员的合理搭配,合理调配工作人员,每小组应至少安排一名操作熟练的技术人员。
(4)为保证各相邻站点具有较高的相对精度,对距离较近的点一定要进行同步观测,以获得它们之间直接观测基线。
(5)为防止控制网在二维约束平差中发生扭曲和变形,起算点坐标数据必须经过严格的检核,应该是同一批次,且点位应均匀地分布在网GPS网周围和网中。
(6)GPS网的点之间一般不要求相互通视,但是为了下一步测量对通视的要求,为了便于拓展,站点最好有一个方向通视。
8 总结
总之,由于GPS静态定位技术具有全天候、测站间无需通视、精度高、速度快、费用省等优点,在现在的测量工作中,已基本取代用经纬仪、全站仪、布设导线网、三角网等传统的步设平面控制网的方法。GPS静态测量也被广泛应用于工程测量、变形监测、航空摄影测量和遥感工作中。