
为什么要修改坐标系统参数?
km2004是自定义椭球,需要在坐标系统里修改目标椭球里手动修改长半轴参数。中海达RTK接入昆明国土CORS得到固定解以后,不修改目标椭球长半轴,直接测量,会测得高程4000多米,平面差1公里多。与实际差2000米多,是错误的!
如何修改目标椭球,请按下面的步骤操作?
下载地址: pan.zhdrtk.com
文件夹:《zhdrtk__2464
ihand20手薄软件 昆明CORS专用安装包: hi-survey road 1.2.1
坐标参数加密文件:km2004.dam
2.1 用USB线连接电脑,
打开USB存储设备

2.2 拷贝参数文件
把坐标参数文件KM2004.dam拷贝到手薄内存”F:\ZHD\GeoPath”文件夹里
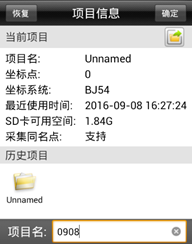
①进项目信息

②输入项目名“0908”确定当天日期ddyy
③在项目设置里点 dam图标

① 点“..”图标返回上一层目录

② 进ZHD\GeoPath选择km2004.dam 确定

km2004是自定义椭球,需要在基准面目标椭球里手动修改。
km2004自定义椭球参数:长半轴6379940,扁率298.257。
① 进坐标系统

② 查看投影。

因为坐标系统参数加密,看到的信息是错的,这个不用管!
③ 查看基准面

④ 目标椭球改为自定义km2004

⑤ 保存更改

点击确定!
以上操作设置完毕后, 测已知点坐标对比是否正确。 满足要求即可开始测量,否则应重新设置!
常见问题
1、参数全部是加密的“......”,更改不了目标椭球?
①把使用最后项目坐标参数打开,②新建项目,③再进坐标系统更改目标椭球!
如果还是无法更改,请使用1.2.1版本进行测量。
2、已经修改目标椭球,但是还是不对,差得离谱?
km2004.dam坐标参数文件有问题,请重新获取!
3、终极必杀技,确认参数文件没问题,更改了目标椭球,还是不对?
手薄恢复出厂设置,清除所有数据,重新安装hi-survey road软件,下载拷贝参数文件,设置目标椭球!


